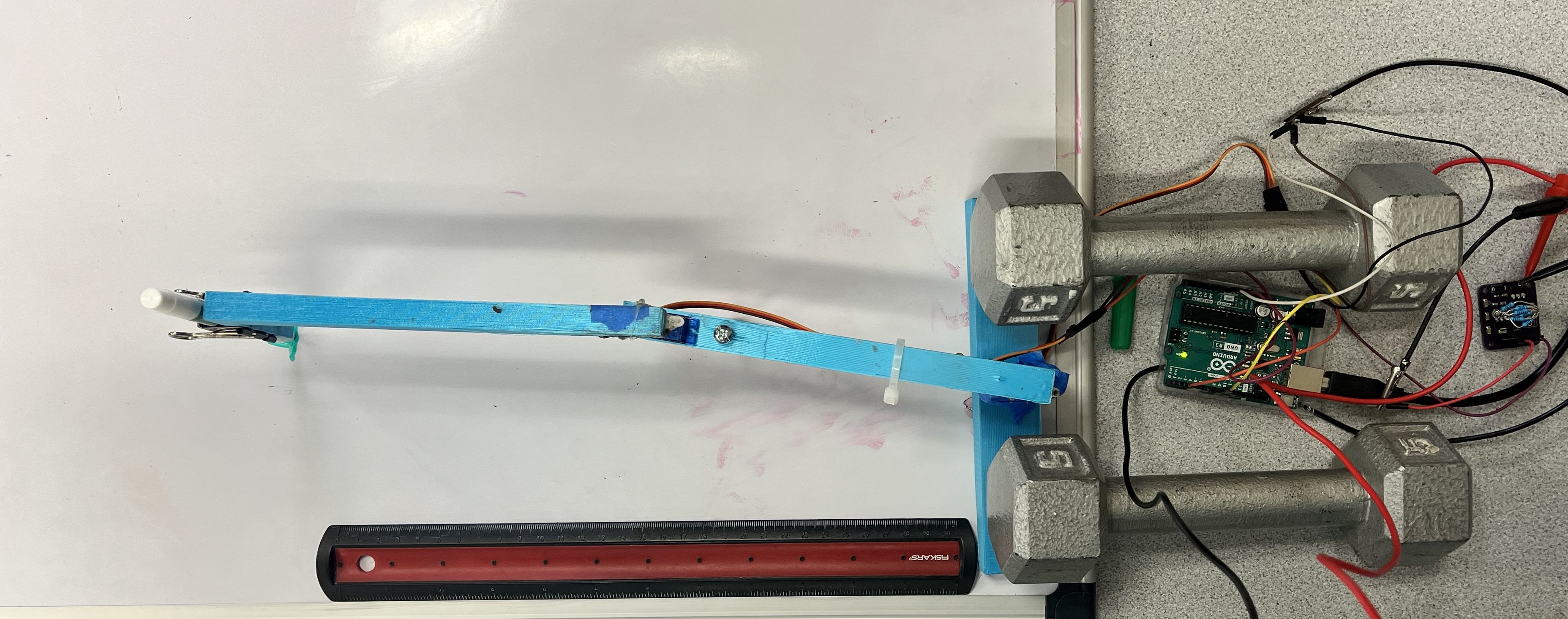
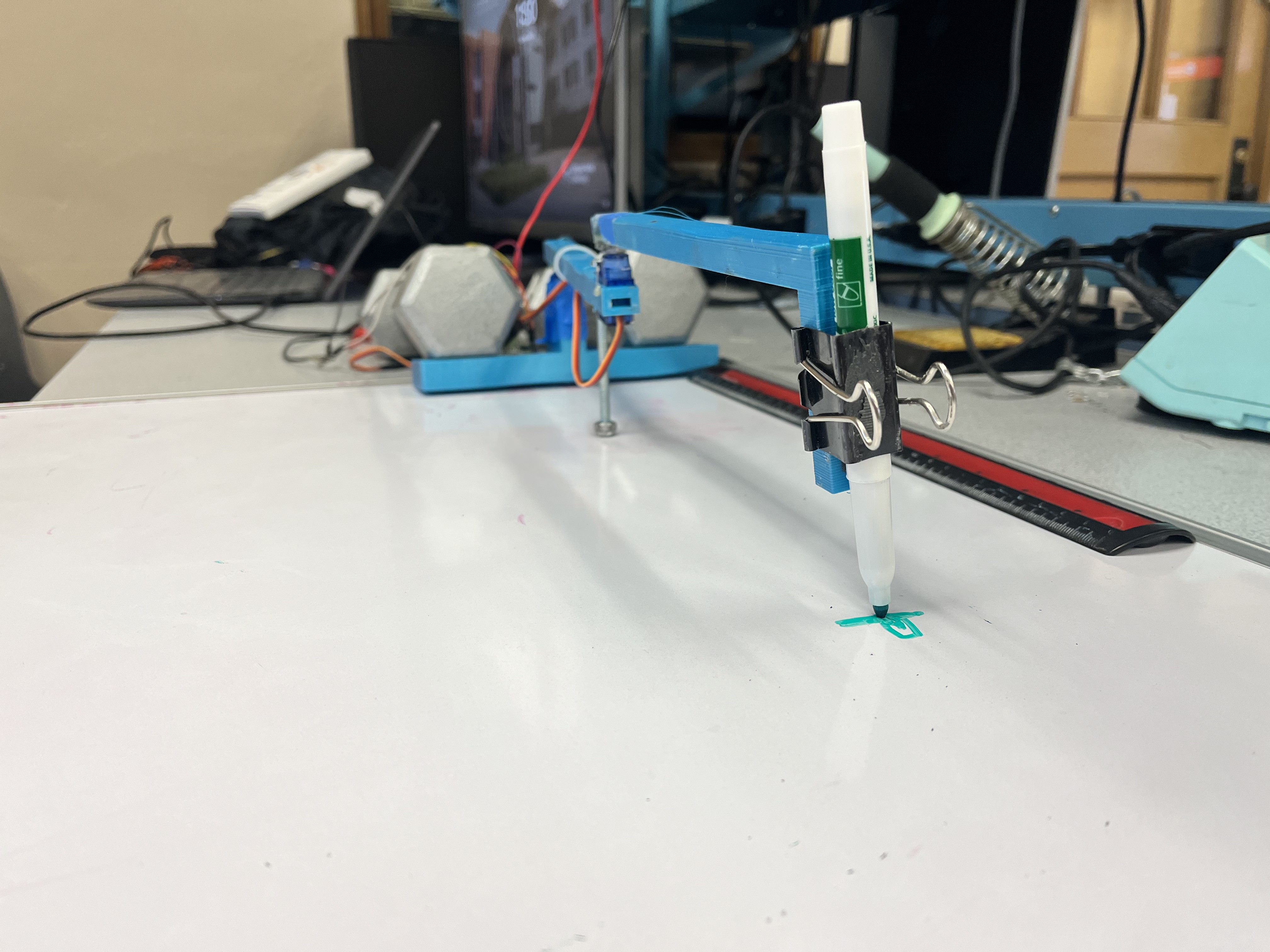
I worked with a team to build a robotic arm that is able to accept G-Code commands via a GUI and draw. I am currently implementing image replication. This arm utilizes a acustom voltage regulator PCB, Python GUI interface, computer vision, CAD with Fusion360, 3D printing, and an Arduino.