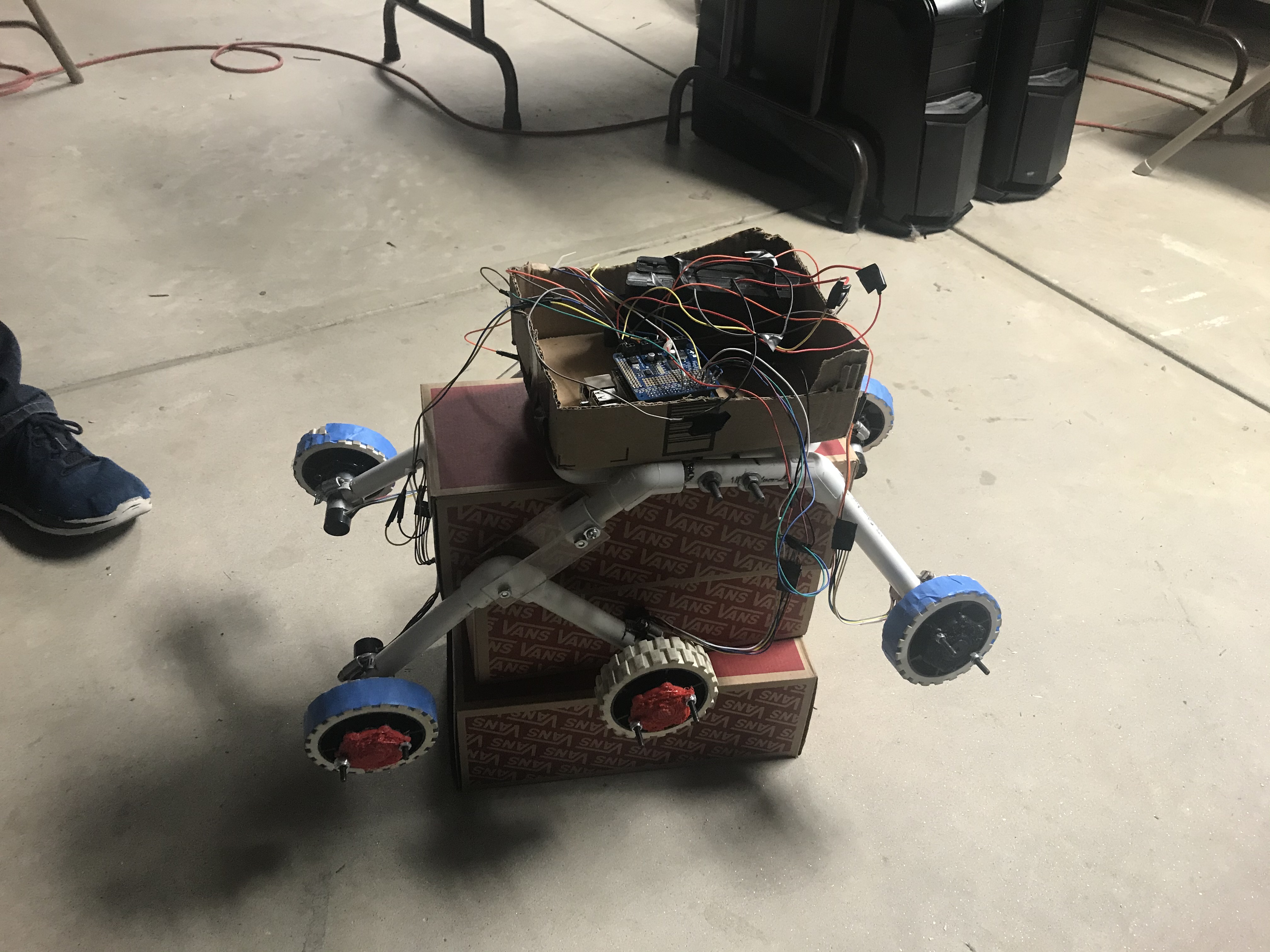

I am working on a rover-type robot that will be able to climb stairs.
This was my first iteration of Robert.
Here is a test video:
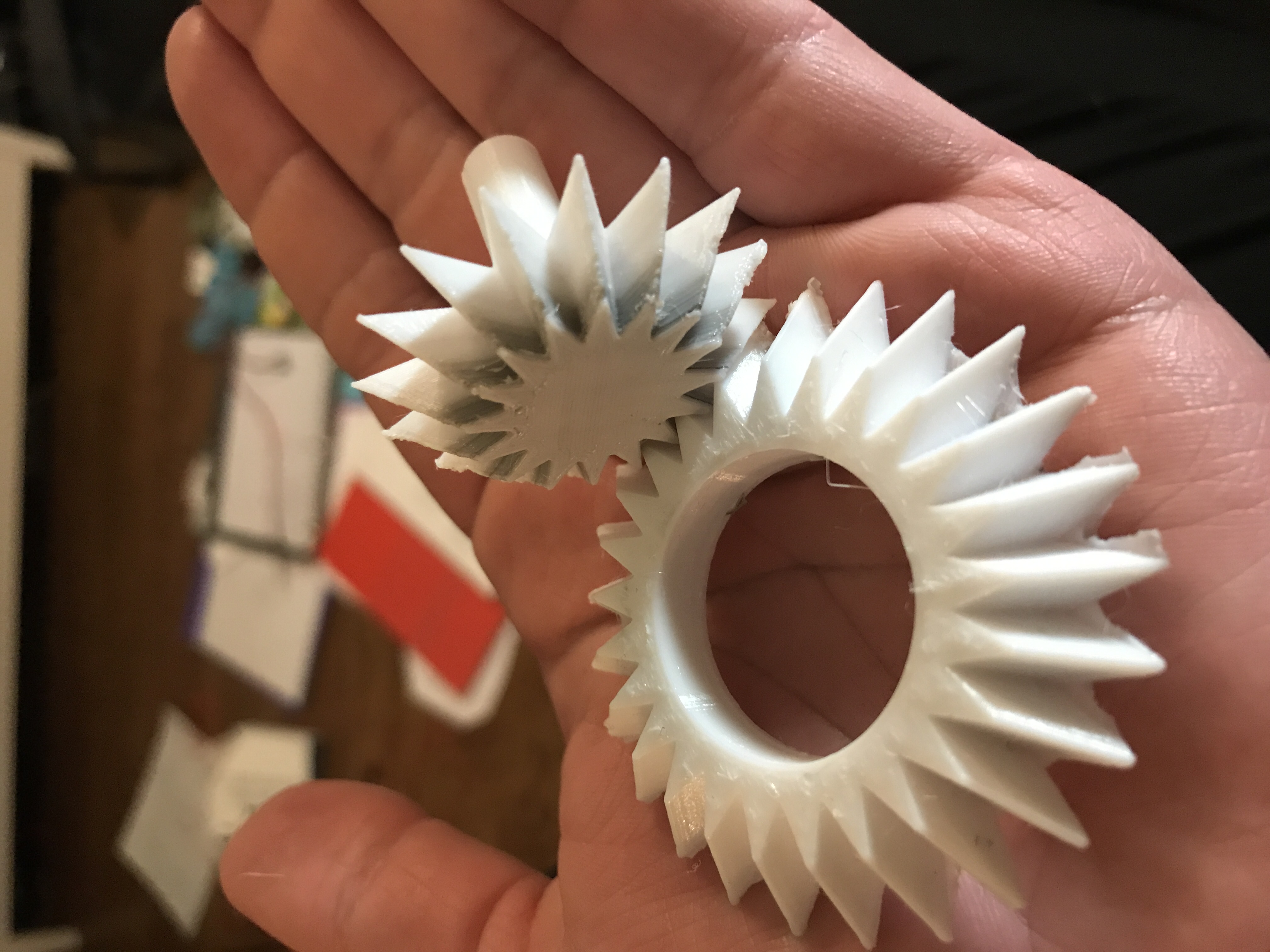

I modeled my own swerve drive, and cadded an entirely new body, which I then printed.
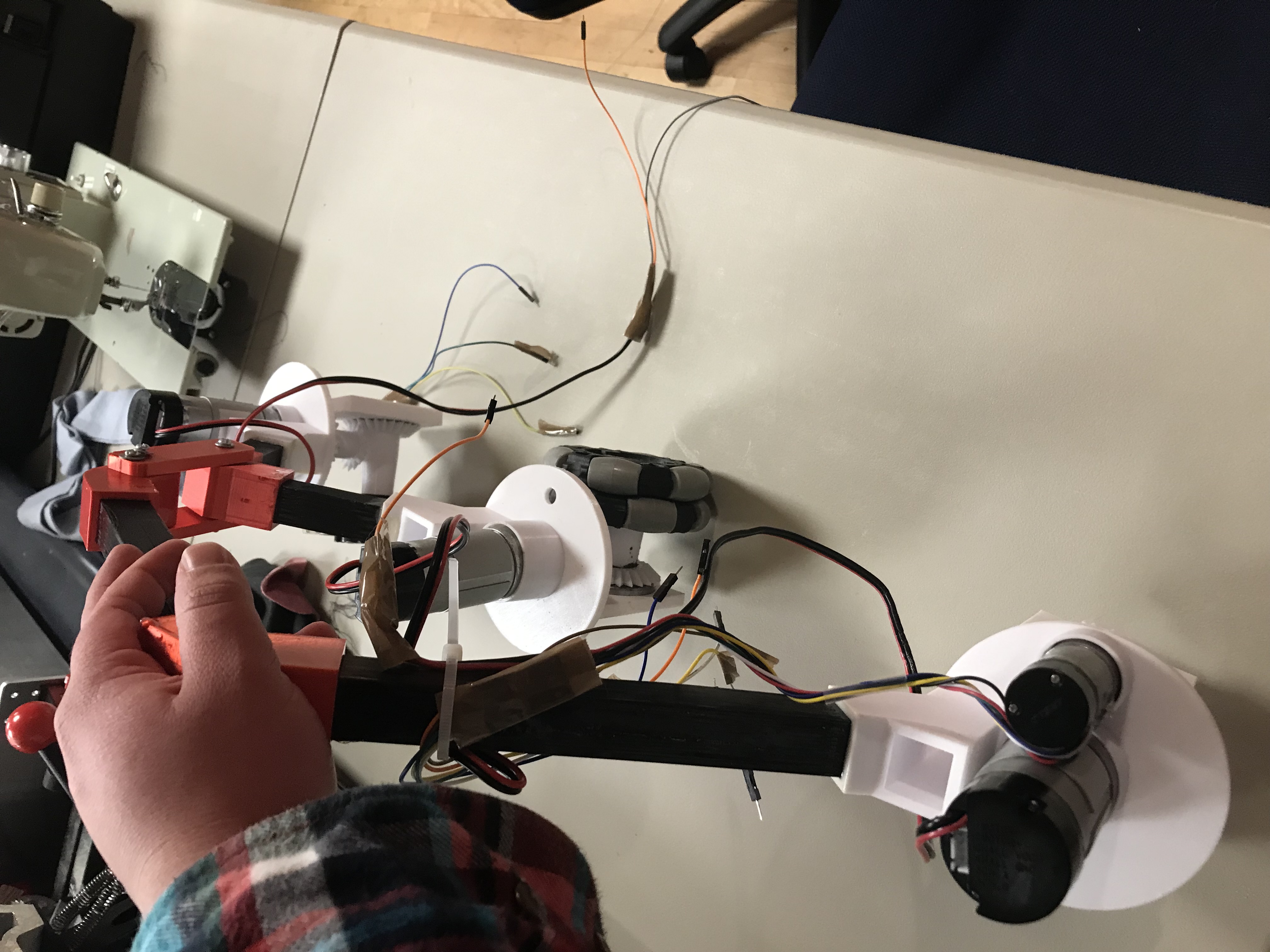


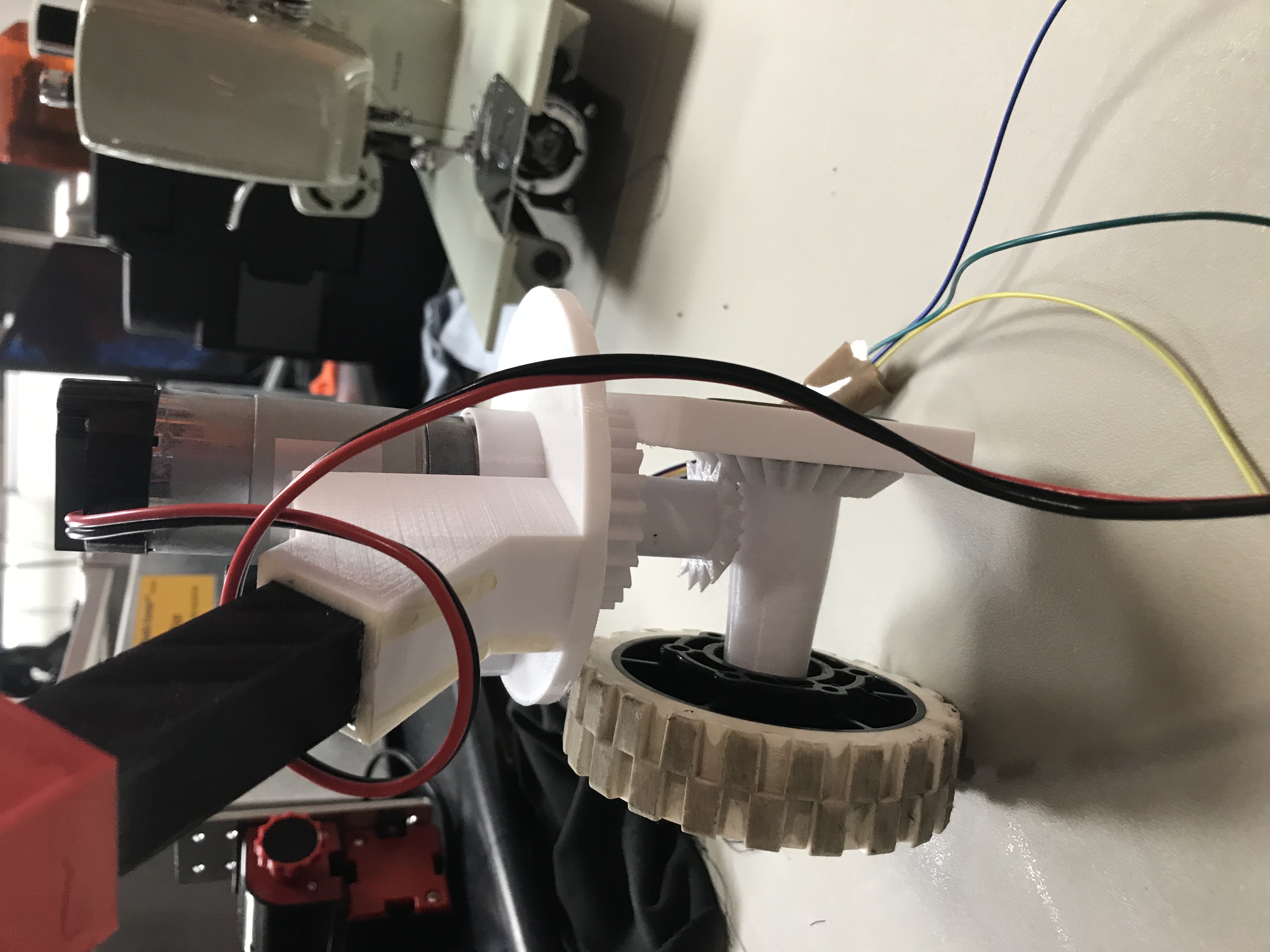
I broke this version of Robert while moving, so I decided to make a new, smaller version, this time without swerve drive.


Robert has been assembled, and is now ready for an electrical system redesign.

